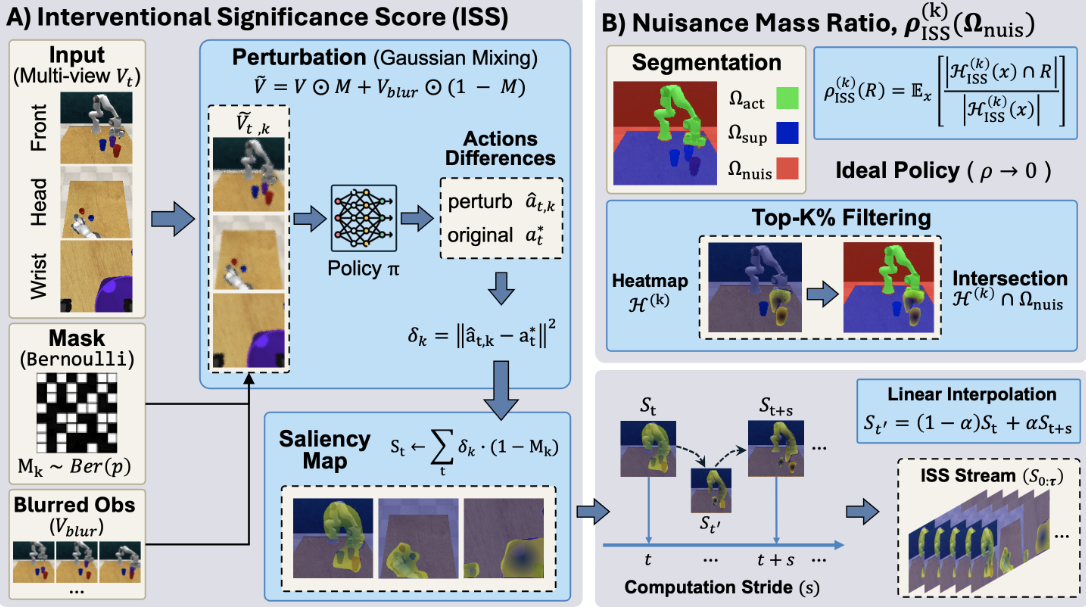
Our latest work has been accepted at ICML (https://icml.cc/). As VLA models become a key route towards general-purpose robot policies, we should not only ask whether a robot completes a task, but also why it chooses an action. Sometimes a policy can appear to work while relying on the wrong visual cues, such as background texture, lighting, or shortcuts in the scene. Our work provides a way to test this more directly: which parts of the image actually change the robot’s action? This helps researchers diagnose VLA failure modes and better understand why some policies generalise to new environments while others do not.
Here we go- Embodied Interpretability: Linking Causal Understanding to Generalization in Vision-Language-Action Models
Project Page: https://lnkd.in/ed4J7YQz
Preprint: https://lnkd.in/eh9eh5pT
Code: available soon for plug-and-play use.
Many congratulations to my PhD students Hanxin Zhang, Mingshuo Xu, and Abdulqader Dhafer, and to our co-authors Shigang Yue and Hongbiao Dong. We are also grateful to the reviewers for their constructive and helpful feedback.
#ICML2026#Robotics#VLA#EmbodiedAI#MachineLearning#VisionLanguageActionModels