Latest News
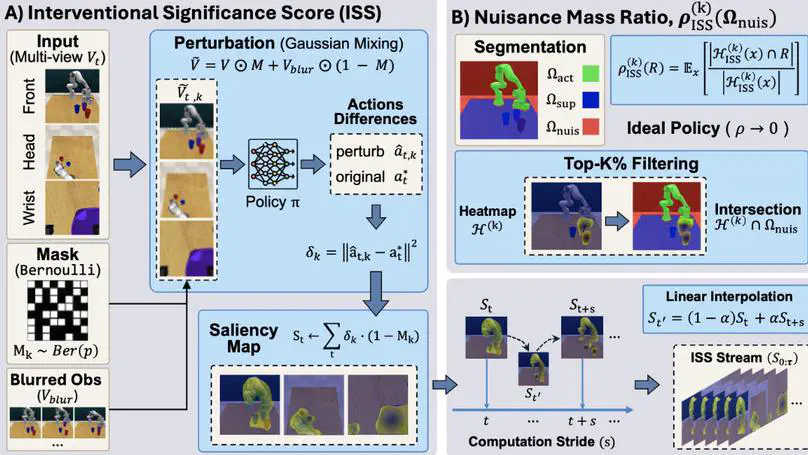
Our latest work has been accepted at ICML 2026. As VLA models become a key route towards general-purpose robot policies, we should not only ask whether a robot completes a task, but also why it chooses an action. Sometimes a policy can appear to work while relying on the wrong visual cues, such as background texture, lighting, or shortcuts in the scene. Our work provides a way to test this more directly: which parts of the image actually change the robot’s action? This helps researchers diagnose VLA failure modes and better understand why some policies generalise to new environments while others do not.






Team finally welcomed our AI workstation, powered by dual RTX Pro 6000 Blackwell GPUs, giving us roughly 200 GB of combined VRAM for our Vision–Language Model (VLM) and World-Model research.



Application Deadline:
University of Leicester — EPSRC DLA funded opportunity
Project title: Embodied Intelligence for Trustworthy Robotic Autonomy in Unconstructed Environments
Background: This PhD project addresses the challenge of achieving trustworthy robotic autonomy in dynamic, unstructured environments—such as hazardous manufacturing facilities, orbital and planetary space robotic operations, or deep-sea installations. While today’s robots can perform impressive tasks, they often lack the safety, reliability, and transparency required to earn human trust. This research focuses on Embodied Intelligence, emphasising accurate perception and spatial understanding to guide robots’ decision-making and adaptability amid real-world uncertainties.